Running Klamp’t apps
Klamp’t comes with a few utility programs that are installed into your Python/Scripts folder.
klampt_browser: a program for browsing through and editing resources.klampt_control: a program for controlling robots and debugging Robot Interface Layer controllers.klampt_path: a command-line utility for modifying paths.klampt_resource: a utility program for modifying resources and generating thumbnails.klampt_sim: an imitation of the SimTest program. An entry point to fast prototyping of controllers using the Python API.
klampt_browser
klampt_browser is the most convenient way to browse through many Klamp’t files. It handles
any resource type that can be visualized, and multiple items (including folders) can be
examined easily using a split-screen visualization.
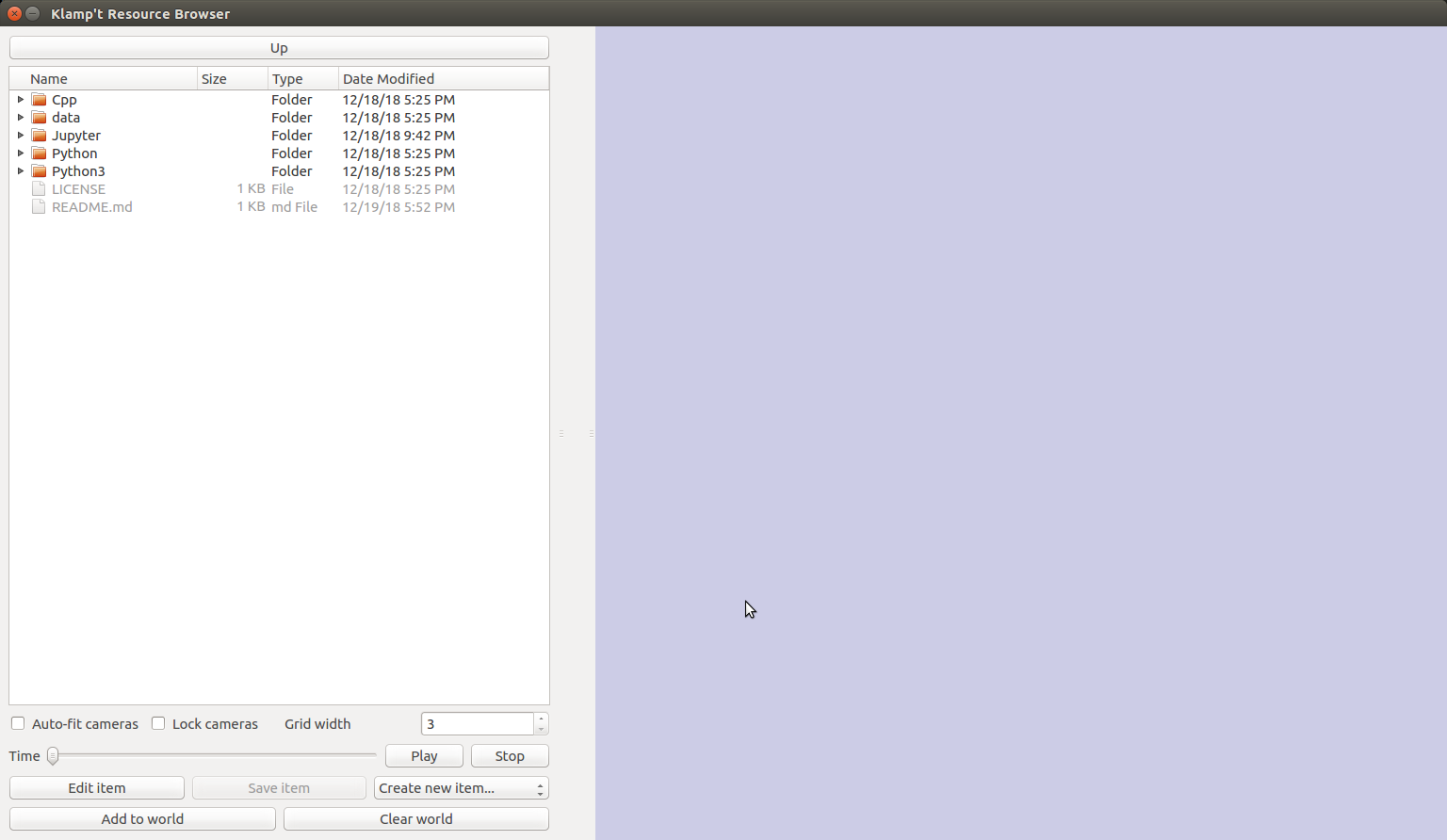
When you launch the program with no arguments, you will be greeted with a file browser and empty scene:
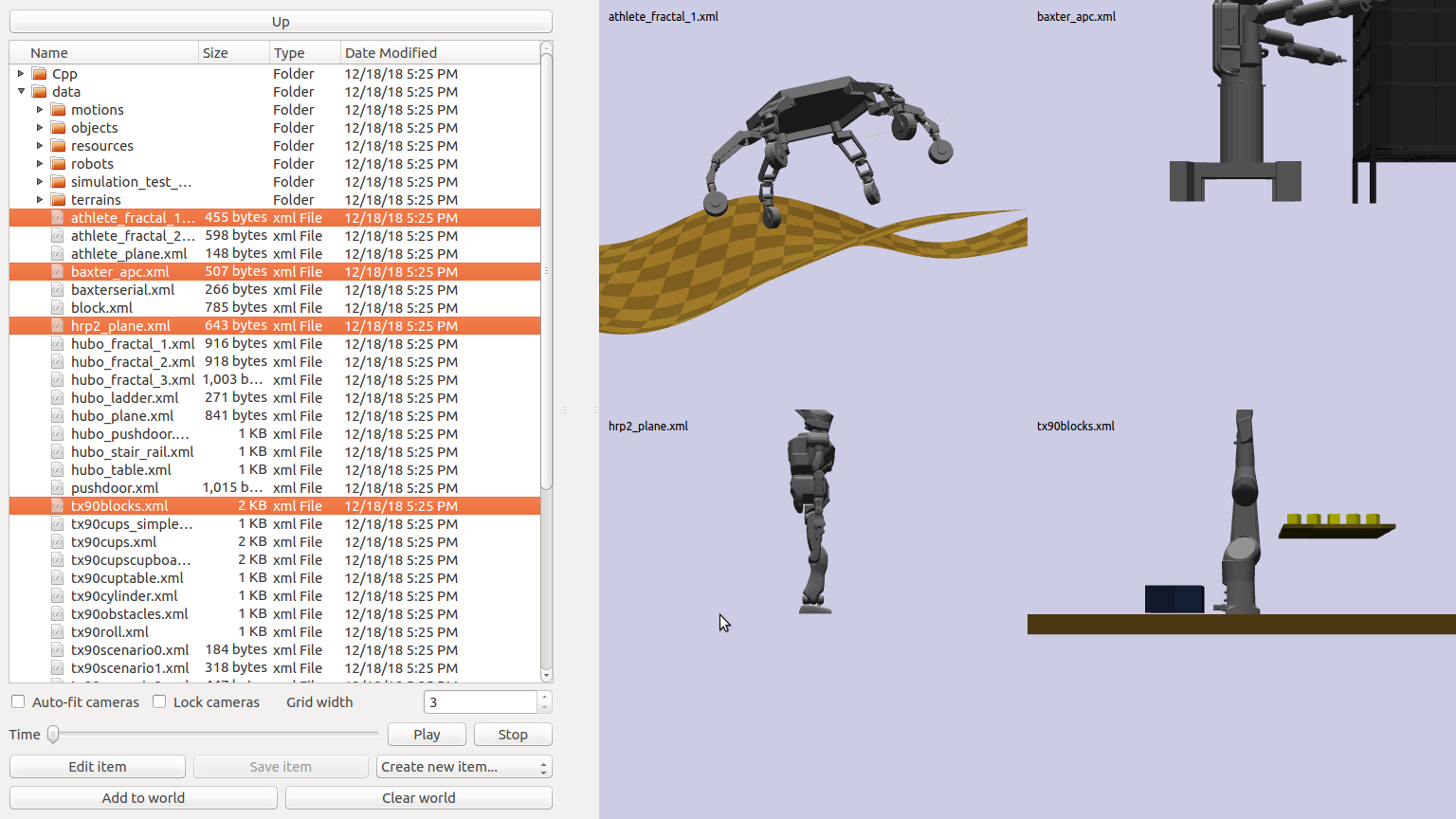
If you then navigate the file tree to some Klampt items, like worlds, you can select them and they will pop up in the scene. Multiple items can be selected using Ctrl + clicking.
The browser has a “reference world” that you will need to add elements to. By default, it is empty. You can configure the reference world on the command line, such as:
klampt_browser Klampt-examples/data/athlete_plane.xml
Or, you may select the elements you want in your world, like world XML files, robots, rigid objects, and static meshes, and click the “Add to World” button.
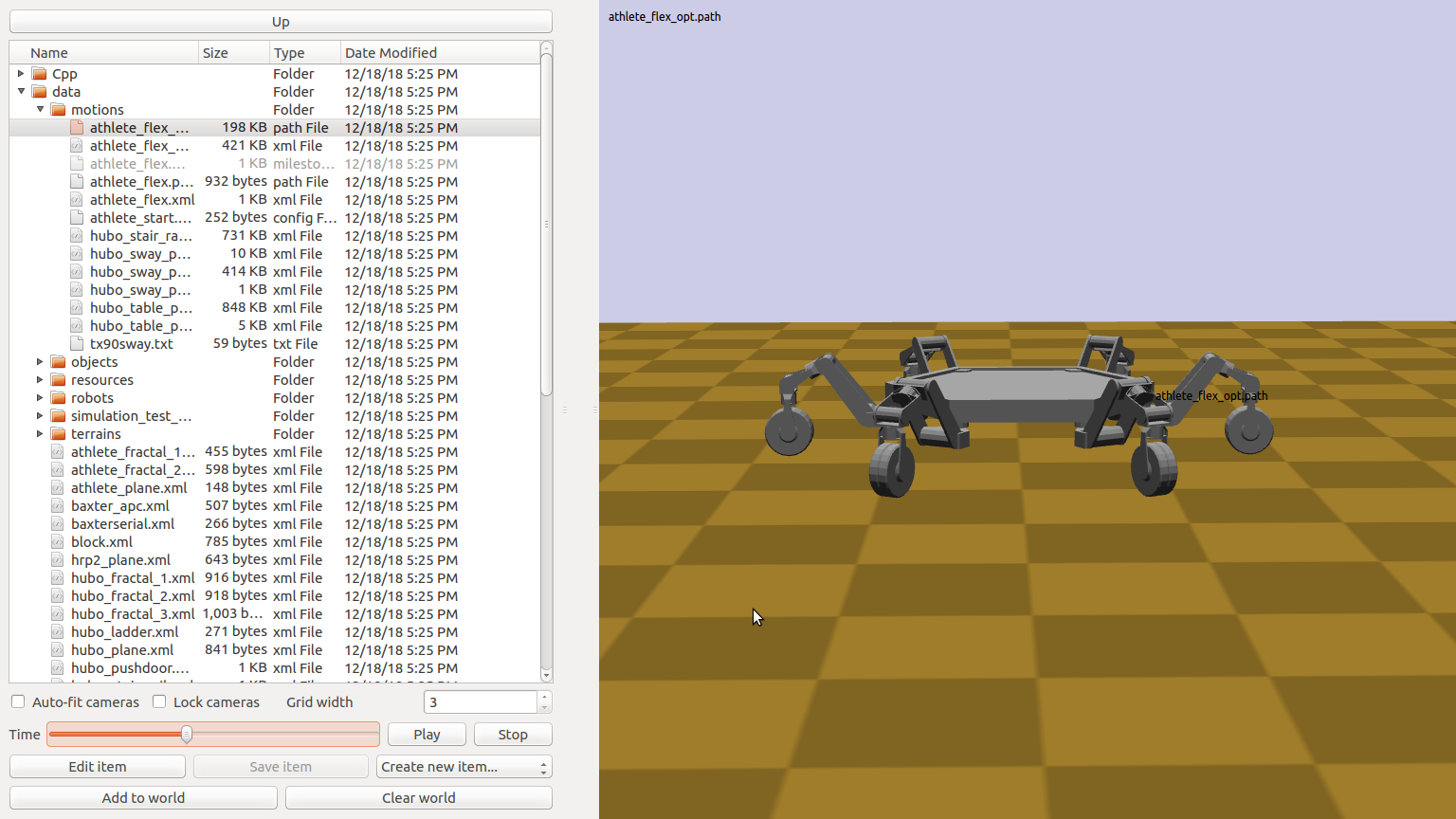
Once you have a reference world, selecting resources like Config,
Configs, Trajectory, and IKGoal will be displayed in context of the first
robot in the reference world. For example, now that the athlete_plane.xml world
has been set up as the reference world, selecting the
Klampt-examples/data/motions/athlete_flex.path file will show an animation:
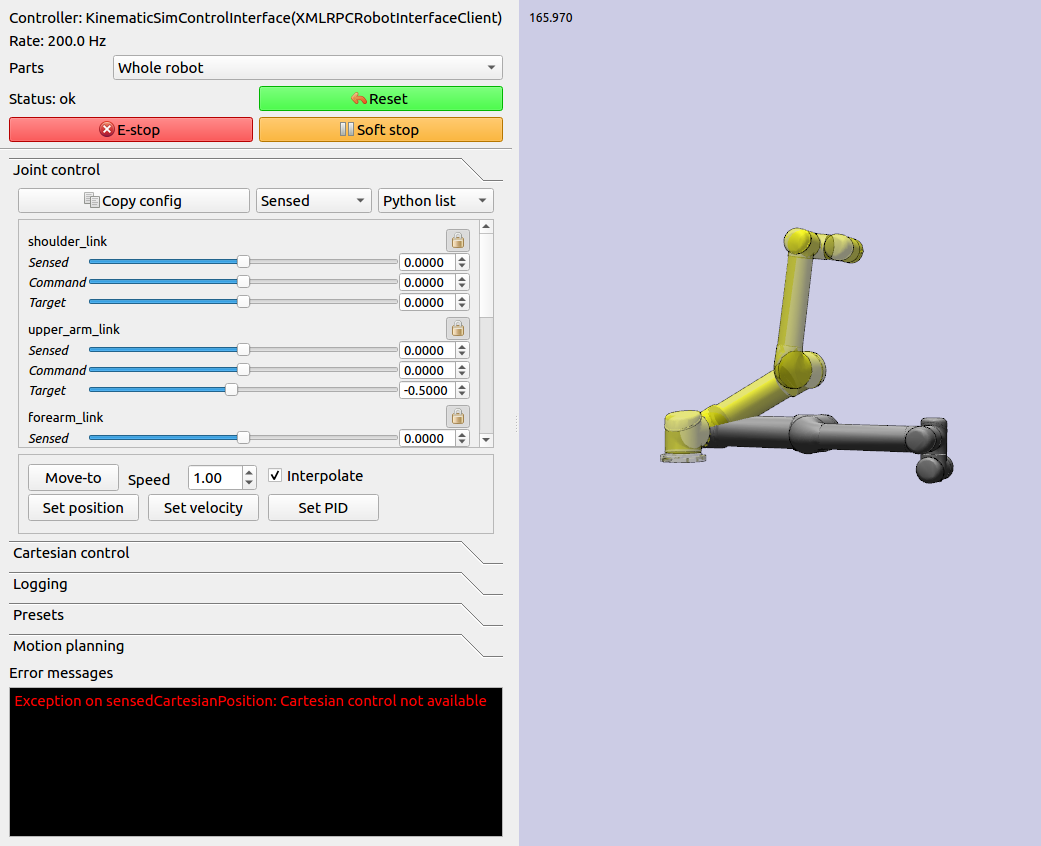
klampt_control
klampt_control allows you to operate robots in real time, to debug implementations
of Robot Interface Layer (RIL) controllers, and launch RIL controllers in server or client
mode.
A controller script is a Python file or module that contains a function
make(RobotModel) -> RobotInterfaceBase. We recommend including such a script
in a RobotInfo JSON file, which specifies
the controller, model, parts, and end effectors:
klampt_control Klampt-examples/robotinfo/ur5/ur5_sim.py
Alternatively, the script may be specified directly on the command line along with the associated robot or world model. The following launches an interface to control a physical UR5 robot:
klampt_control Klampt-examples/robotinfo/ur5/controller/ur5_ril.py Klampt-examples/data/robots/ur5.rob
The default kinematic simulation interface is specified with klampt.control.simrobotcontroller,
so the following controls a virtual UR5:
klampt_control klampt.control.simrobotcontroller Klampt-examples/data/robots/ur5.rob
Similarly, you can just include the --sim flag:
klampt_control --sim Klampt-examples/data/robots/ur5.rob
To launch a controller as an XML-RPC server, you can simply pass the --server flag:
klampt_control --server 0.0.0.0:7881 Klampt-examples/robotinfo/ur5/ur5_sim.rob
To run the klampt_control GUI in client mode, run:
klampt_control --client http://localhost:7881
If you are not running on the same machine or do not have the same directory structure, you will need to specify the robot file as well:
klampt_control --client http://[SERVER_IP]:7881 Klampt-examples/robotinfo/ur5/ur5_sim.rob
klampt_path
klampt_path performs basic editing of Trajectory (.path), Configs (.configs),
and MultiPath (.xml) files. You can shift / scale the time, and concatenate multiple
paths together.
klampt_sim
klampt_sim performs simulation of a world, and can prototype Python controllers specified
in the experimental Controller API. The following image shows the output from:
klampt_sim Klampt-examples/data/hubo_plane.xml

klampt_resource
klampt_resource --robot=INPUT_ROBOT --transfer=TARGET_ROBOT INPUT_FOLDER [OUTPUT_FOLDER]
converts all compatible resources from one robot to another. The robots must share link names.
Applicable resource types are:
Config (.config), Configs (.configs), Trajectory (.path, .traj), MultiPath (.xml),
IKObjective (.ikgoal), Hold (.hold), Grasp (.grasp).
klampt_resource --thumbnails --world=WORLD INPUT_FOLDER [OUTPUT_FOLDER] generates a folder of
thumbnail PNGs given a folder containing Klampt resources. This is useful when you have
programmatically generated many worlds, configurations, or motions.
klampt_resource --convert=TYPE INPUT [OUTPUT] converts a resource from one type to another.
Currently only supports TYPE “json”. See klampt_path for conversions of path / trajectory
types.
Example files
The Klampt-examples Github project is a companion to the main Klampt project, and you are highly recommended to download this to get started.
World files for different robots and problem setups are available in the Klampt-examples/data subdirectory:
hubo*.xml: the KAIST Hubo humanoid.puma*.xml: the Puma 760 industrial robot.tx90*.xml: the Staubli TX90L industrial robot.baxter*.xml: the Rethink Robotics Baxter robot.
Other test robots, objects, and environments are available in the
Klampt-examples/data/{robots,objects,terrains} subdirectories. Some files of
interest may include:
athlete.rob: the NASA ATHLETE hexapod (incomplete, missing wheel geometry).
atlas.rob: the Boston Dynamics ATLAS robot.
cartpole.rob: a cart-pole balancing control problem.
footed_2d_biped.rob: a simple 2D biped mimicking a human’s forward motion.
footed_2d_monoped.rob: a simple 2D monoped.
hrp2.rob: the AIST HRP-2 humanoid
pr2.rob: the Willow Garage PR2 robot (requires KrisLibrary to be built with Assimp support)
robonaut2.rob: the NASA Robonaut2 humanoid torso.
robotiQ_3finger.rob: the RobotiQ 3-finger Adaptive Gripper.
simple_2d_biped.rob: a simple 2D biped mimicking a human’s lateral motion.
swingup.rob: a simple pendulum swingup control problem.
plane.env: a flat plane environment
block.obj: a 40cm block
block_small.obj: an 8cm block
Utilities and Demos
The Klampt-examples/Python3/utils and
Klampt-examples/Python3/demos folders contain a few example
utilities and programs that can be built upon to start getting a flavor
of programming Klamp’t applications in Python.
Demos:
exercise_joints.py: moves between all of a robot’s joint extrema. Useful for debugging robot models.gl_vis.py: a simple visualization of a simulation using a visualization plugin.gl_vis_widgets.py: a plugin with widgets for visual editing, and demonstrating custom GUI menu actions.kbdrive.py: drive a simulated or real robot around using the keyboard. The first 10 joints can be driven via a positive velocity with the top row of keys 1,2,…,0 and a negative velocity with the second row of keys q,w,…,p.mouse_capture.py: shows how to capture mouse clicks in the visualizer.path_test.py: tests thepath_to_trajectory()function with various options.planning_test.py: performs tests of the motion planning module, with various options.pose.py: utility for visual posing of a simulated or real robot.resource_demo.py: demonstrates various functions of the klampt.io.resource module.robotiq.py: modeling and simulating the RobotiQ 3-finger Adaptive Gripper. This code emulates the underactuated transmission mechanism of each finger.robotiqtest.py: performs a simulation of the RobotiQ gripper closing and opening on an object.sensor_test.py: demonstrates how to use a simulated camera sensor.sphero.py: simulates the Sphero 2.0 robot driving around.trajectory_test.py: demonstrates the various types ofTrajectoryand theexecute_trajectory()function.vis_template.py: demonstrates several functions of the vis module.workspace_test.py: demonstrates usage of the workspace calculation utilities.