Organization
The main philosophy behind the Klamp’t design is to decouple Modeling, Planning, Control, and Simulation modules. This division provides a clear logical structure for developing large software systems for operating complex intelligent robots.
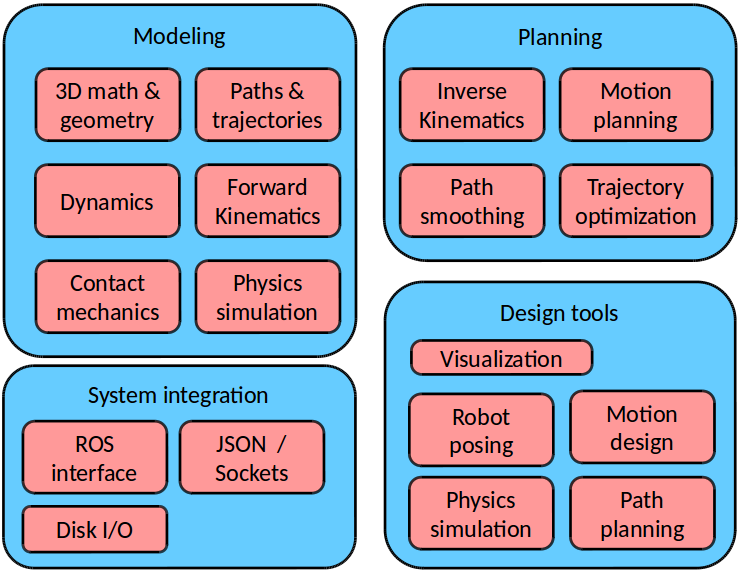
Modeling refers to the underlying knowledge representation available to the robot, e.g., limb lengths, physical parameters, environment, and other objects in its vicinity. The Modeling module contains methods for representing this knowledge. It also includes the ubiquitous mathematical models, such as kinematics and dynamics, trajectory representations (e.g., splines), and contact mechanics that required for planning and control.
Planning refers to the computation of paths, trajectories, feedback control strategies, configurations, or contact points for a robot. Planning may be performed either offline or online.
Control refers to the high-rate processing of sensor information into low-level robot controls (e.g., motor commands). This also includes state estimation. Note that the boundary between planning and control is fuzzy, because a fast planner can be used as a controller, or a planner can compute a feedback control strategy.
Simulation refers to a physical simulation of a virtual world that is meant as a stand-in for the real world and robot. The simulation module constructs a detailed physical rigid-body simulation and instantiates a controller and virtual sensors for a simulated robot. The controller then applies actuator commands that apply forces in the simulation.
Auxiliary modules include Visualization, referring to the display of a simulated or animated robot and its environment, User interface, and I/O, referring to the serialization and management of resources.
Planning, control, and simulation are related by the use of (largely) common models. However, the simulation model does not need to be the same as the planner or controller’s model. For example, an object’s position may be imperfectly sensed, or a free-floating robot like a humanoid may not know precisely where its torso lies in 3D space. Also, for computational practicality a planner might work on a simplified model of the robot (e.g., ignoring the arms during biped walking) while the controller must expand that information into the full robot representation.
Module structure
The Klamp’t Python API is organized as follows:
klampt: the main Klamp’t module, and includes robot kinematics, dynamics, simulation, and geometry representations. Also includes low-level IK solving and motion planning modules.klampt.math: basic 3D geometry.klampt.modeling: other modeling, including IK, trajectories, Cartesian interpolation, and sub-robot indexing. Setting and getting “configurations” for many objects.klampt.plan: motion planning for robots.klampt.sim: more advanced simulation functionality, such as logging and custom actuator and sensor emulation.klampt.io: Unified I/O for all types of Klamp’t objects. Supports JSON formats for some objects as well. Resource loading, saving, and visual editing.klampt.vis: Visualization.Klampt.control: control modules.
You should also obtain the Klampt-examples Github project
for examples of how to run the Klampt Python API. Example Klampt data files are stored in the Klampt-examples/data,
and include
data: world XML filesdata/robots: robot filesdata/objects: rigid object filesdata/terrains: terrain filesdata/motions: motionsdata/resources: an example resource collectiondata/simulation_test_worlds: worlds to test simulator functionality
Python code examples are found in Klampt-examples/Python3, and include:
Python3/demos: demonstrations about how to use various aspects of the Python klampt API.Python3/exercises: exercises for implementing basic concepts in Klamp’t.Python3/utils: utility programs.
Klampt project source
The project source can be found in https://github.com/krishauser/Klampt. The master branch will be kept up-to-date with bug fixes and other upgrades. It is recommended that you build from source if you are doing any significant development using Klampt.
The C++ API is found in the Klampt/Cpp folder. Files to build the Python API are found in Klampt/Python.
Apps
Once the apps are built, they will be found in the Klampt/bin/ folder.
RobotTest,RobotPose,SimTest,SimUtil: the main useful appsMotorCalibrate,URDFtoRob: useful programs for setting up robot files.Merge: utility for merging several robotsPack,Unpack: utilities for building and separating composite resources, not widely used anymore.
Build and temporary files
Build files
CMakeFiles.txt: CMake main file describing the build configuration.CMakeModules/: Auxiliary CMake files. If you are building other projects using Klampt, theKlamptDependencies.cmakefile will be useful to include.tests: A few basic test programs, built onmake test.Cpp/Documentation/doxygen.conf: C++ documentation build file (uses Doxygen)Python/docs/: Python documentation build files (uses Sphinx)update.sh: Linux script to cleanly update all of Klampt and KrisLibrary.dist/linux_Python: Docker-based scripts to build Python wheels.dist/windows: Windows script to cleanly update, build, and package all of Klampt and KrisLibrary.
Temporary files
lib/libKlampt.a: Once built, the main Klamp’t library file will be stored here to be included into new projects.CMakeCache.txt: CMake cache file. May need to be deleted if you are having build problems.CMakeFiles/,Python/build,Makefilecmake_install.cmake,cmake_uninstall.cmake: temporary build files. These can be safely deleted after a successful build.