Geometry and Appearance
Klamp’t uses a variety of geometry types to define geometric primitives, triangulated meshes, and point clouds. Each geometry may also be associated with an Appearance.
Geometries and collision geometries
Klamp’t stores Geometry datain an object’s local frame.
The notion of a collision geometry combines some underlying geometric data with transformations and collision acceleration structures.
Collision geometries have a current transformation that sets where they exist in space, and is used for collision testing.
Collision geometries also support an additional, nonnegative collision margin setting that “expands” the underlying geometry when performing collision testing. The margin does not actually affect the geometric data, but rather it changes the distance threshold that is used to consider colliding vs. noncolliding geometries.
If either object has a collision margin, the collision detection functions treat the underyling data as though it were “expanded” by that amount. So, for distance queries, the sum of the objects’ collision margins is subtracted from the distance result.
Note
In visualization, a geometry is drawn in its current transformation, but its collision margin is not. If collision detection is reporting that two objects are touching but they don’t appear to be, you should check their collision margins.
Geometric operation support
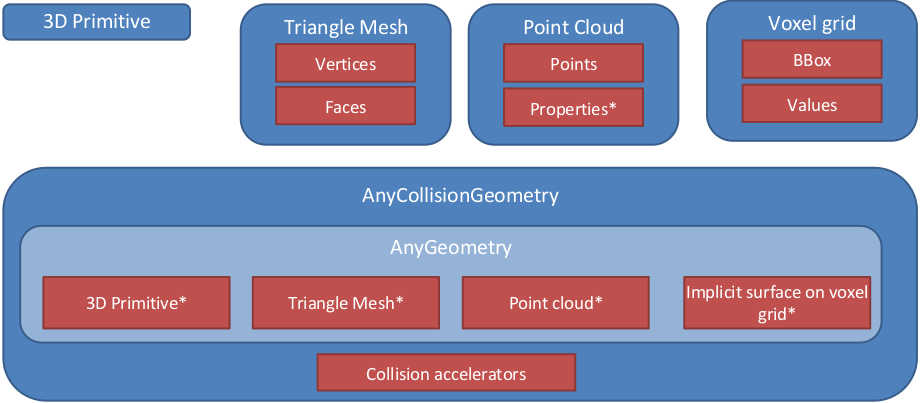
The following geometry types are currently supported:
Triangle mesh: complete, optimized, and well-tested.
Point cloud: nearly complete support.
Geometric primitive: nearly complete support.
Implicit surface volume grid: partial support.
The following operations are supported:
Drawing: All types supported.
Collision detection in planning. All types supported.
Tolerance verification. All types supported.
Distance detection in planning. primitive/primitive, primitive/point cloud, triangle mesh/triangle mesh, point cloud / point cloud, point cloud / implicit surface distance functions are available.
Ray casting. Triangle meshes, point clouds, and geometric primitives.
Contact detection in simulation. Triangle mesh / triangle mesh and triangle mesh / point cloud only.
In addition, there is a notion of a geometry Group, which can combine multiple sub-geometries.
Geometry caching
When multiple objects load the same geometry file, Klamp’t uses a caching mechanism to avoid reloading the file from disk and re-creating collision acceleration structures. This is essential for loading very large scenes with many replicated objects. However, when geometries are transformed by API calls, they are removed from the cache. So, to achieve maximum performance with many duplicated geometries, it is recommended to transform the geometry files themselves in advance rather than dynamically through the API.
API summary
The Geometry3D container class is an abstraction of all supported types of
geometries. Each data type is represented by one of the data classes,
TriangleMesh, PointCloud, GeometricPrimitive, and
VolumeGrid.
Basic construction:
geom=Geometry3D(): creates a new standalone geometry, not associated with any world object.geom=Geometry3D(data): creates a new standalone geometry from a geometry data class.geom=[RobotModelLink/RigidObjectModel/TerrainModel].geometry(): retrieves a reference to the object’s geometry.geom.clone(): duplicates the geometry.geom.empty(): returns True if the geometry is empty.geom.free(): if the geometry is standalone, deletes the data associated with it.geom.set(geom2): copies the contents of geom2 into this geometry.geom.loadFile(fn): loads a geometry from a file.geom.saveFile(fn): saves a geometry to a file.geom.convert(type, param=0): converts a geometry in-place to another type. GeometricPrimitive -> any, TriangleMesh -> PointCloud, TriangleMesh -> VolumeGrid, and VolumeGrid -> TriangleMesh are supported.
Extraction of data:
geom.type(): returns a string giving the type of the object.geom.getTriangleMesh(): returns theTriangleMeshdata of the geometry if the type is'TriangleMesh'geom.getPointCloud(): returns thePointClouddata of the geometry if the type is'PointCloud'geom.getGeometricPrimitive(): returns theGeometricPrimitivedata of the geometry if the type is'GeometricPrimitive'geom.getVolumeGrid(): returns theVolumeGriddata of the geometry if the type is'VolumeGrid'geom.numElements(): returns the number of elements.geom.getElement(id): returns a sub-object of a Group, TriangleMesh, or PointCloud geometry.
** Modifying current transform and collision margin **
The current transform of a geometry of a world object is updated when its configuration changes. However, if you are using standalone geometries, you will have to set the transformation yourself. All quantities are measured with respect to world coordinates.
geom.setCurrentTransform(R,t): sets the object’s current transformation to the rotation R and translation tgeom.getCurrentTransform(): returns the object’s current transformation.
To change the collision margin, use the following. Collision margins are by default 0.
geom.setCollisionMargin(margin): sets the object’s collision margingeom.getCollisionMargin(): gets the object’s collision margin.
Collision detection
The Geometry3D class allows collision testing between
geometries. All the standard Klamp’t geometry types (geometric
primitives, triangle meshes, point clouds) are supported.
For convenience, the klampt.model.collide
module provides utility functions for checking collision with sets of
objects, as well as a WorldCollider class that by checks collision
between any set of objects and any other set of objects. These methods
return an iterator over collision pairs, which allows the user to either
stop at the first collision or enumerate all collisions.
API summary
The Geometry3D methods may be used for performing collision detection:
geom.getBB(): returns a loose approximation to the object’s bounding box, in its current configuration.geom.getBBTight(): returns a tight approximation to the object’s bounding box, in its current configuration. Slower thangetBB.geom.collides(geom2): returns True if the objects collide.geom.distance(geom2): returns the distance / signed distance between the objects.geom.distance_simple(geom2,relErr=0,absErr=0): returns the distance / signed distance between the objects as a float.geom.distance_point(pt): returns the distance / signed distance between the object and a point.geom.rayCast(source,direction): casts a ray with a given source and direction.geom.rayCast_ext(source,direction): same as rayCast, but returns the index of the first intersected element.
For more control over distance queries, you may use the following functions, which
have the suffix _ext and accept a DistanceQuerySettings object:
geom.distance_ext(geom2,settings)geom.distance_point_ext(pt,settings)
The following WorldCollider methods are used most often:
collisions(): checks for all collisions.collisions(filter): checks for all collisions between objects for which filter(obj) returns Truecollisions(filter1,filter2): checks for all collisions between pairs of objects for which filter1(objA) and filter2(objB) both return TruerobotSelfCollisions,robotObjectCollisions,robotTerrainCollisions,objectObjectCollisions, andobjectTerrainCollisionscheck collisions only between the indicated robots/objects/terrains.rayCast(s,d): performs ray casting against objects in the world and returns the nearest collision found.
Appearance
Forthcoming. See the Appearance API for detailed documentation.