
Data-efficient learning using gray-box learning and prior experience
Summary (click to show)Recent breakthroughs in deep learning has made it a popular approach in various fields of engineering and science, including robotics. While deep learning has demonstrated impressive results, it is extremely data-hungary and transfers poorly to new tasks once trained. However, data in robotics tasks are often times scarce and very expensive. In this project, we investigate data-efficient learning for robotics (decision-making) tasks by 1) taking advantage of knowledge of physics and performing "gray-box" learning and 2) using prior experience on similar tasks.
gray-box learning, deformable object, decision-making, meta-learning
NSF National Robotics Initiative, NASA
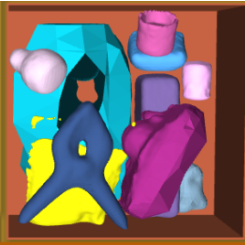
Autonomous robot packing of complex-shaped objects
Summary (click to show)Automated packaging or packing, a process during which robots stow objects into small containers, e.g., shipping boxes, is an open research problem with significant potential impact on warehouse automation. Packing items densely improves the storage capacity, decreases the delivery cost, and saves packing materials. This project focuses on packing objects of arbitrary shapes, weights, and deformation into a single shipping box with a robot manipulator. We seek to advance the state-of-the-art in robot packing with regards to optimizing container size for a set of objects, planning object placements for stability and feasibility, and increasing robustness of packing execution with a robot manipulator.
packing, warehouse automation, optimal planning
Amazon Research Award

Image-guided robotic opthalmic microsurgery
Summary (click to show)With collaborators at Duke University, we are studying robotic microsurgery in the eye guided by real-time intraoperative imaging from optical coherence tomography (OCT). We focus on the task of guiding a needle precisely to a target or along a 3D path, which is challenging for human surgeons due to the limitations of microscope depth perception and the accuracy of the human hand. Volumetric images from the eye are acquired by our OCT system at approximately 1 volume per second at the resolution of a few microns, and our needle guidance software processes the images, tracks the target in the tissue, predicts cornea deformation, and optimizes robot trajectories to guide the needle accurately to the target. We have also investigated Our techniques are able to achieve approximately 50 micron accuracy in the Deep Anterior Lamellar Keratoplasty (DALK) procedure.
surgical robotics, microsurgery, optical coherence tomography, DALK
Coulter Foundation, NIH National Eye Institute
Tele-nursing robots
Summary (click to show)
Our lab is developing the Tele-Robotic Intelligent Nursing Assistant (TRINA), a remote-controlled robot to perform common nursing duties inside hazardous clinical
areas, which could reduce infection risk to healthcare workers by minimizing exposure to contagions and other biohazards. They could also reduce infection risk to immunocompromise patients. Apart from the engineering challenge, we are addressing scientific questions regarding human-robot interfaces, haptics, and semi-autonomous control and planning algorithms.
tele-nursing, assisted teleoperation, real-time planning, human-robot interaction
NSF National Robotics Initiative, NSF CAREER, NSF RAPID
Cooperative motion planning for human-operated robots
Summary (click to show)
This project explores the hypothesis that advances in robot motion planning algorithms will lead to improved intuitiveness, safety, and task performance of human-centered robots such as intelligent vehicles, tele-surgery systems, search-and-rescue robots, and household robots. Existing planning techniques lead to awkward and unintuitive interaction with humans. To bridge this gap, we are developing cooperative motion planning algorithms that reason about users' intended goals and then take control of a robot's low level motion to achieve those goals.
human-robot interaction, intent recognition, assisted teleoperation, real-time planning, integrated planning and perception
NSF National Robotics Initiative, NSF CAREER, IU Faculty Research Support Program
Knowledge- and structure-driven motion planning
Summary (click to show)
The large motion planning problems that arise in robotics, CAD/CAM, animation of virtual characters, and surgical planning are very challenging: they require searching high-dimensional state spaces with complex geometric constraints, nonlinear dynamics, often with contact and impact, and long time horizons.
Prior approaches to these problems either exploit problem structure and/or embed a great deal of domain knowledge by hand into a planner. But this process is tedious, error-prone, and does not scale well to harder problems whose structure is non-obvious. This project will investigate automated strategies for planning systems to automatically discover common solution structures from past experience and to reuse this knowledge in new problems.
theory, hybrid motion planning, optimal planning, locomotion
NSF Robust Intelligence Program
Real-time kinodynamic planning and dynamic optimization
Summary (click to show)
Computation time is a major impediment to dynamic, autonomous, and safe robot behavior. We are investigating faster planning algorithms and better integration architectures that can mitigate some of these limitations. New fast optimization techniques let robots execute motions more quickly while strictly respecting dynamic constraints; moreover, the added computational costs are worth the savings in execution time. New time-stepping architectures are proven to be asymptotically complete in a deterministic environment with changing goals, and experiments suggest improved safety in unpredictably dynamic environments compared to other state-of-the-art techniques. These algorithms have been applied to assisted teleoperation of a 6DOF robot arm, navigation amongst unpredictable moving obstacles, and humanoid robot locomotion.
kinodynamic planning, real-time planning, optimal planning, locomotion
Inactive projects

Intelligent clinical decision support using Markov decision processes
Summary (click to show)
The explosion in the amount of medical data available in Electronic Health Records (EHRs) provides an opportunity for computers to aid clinicians in providing effective, affordable healthcare. We are investigating Markov Decision Process techniques that are able to recommend patient-specific treatment plans in the presence of noisy and incomplete observations. Like a real doctor, the system is able to reason in the space of belief states, integrating uncertainties and contingencies into its plans. Results on a 5,807 patient dataset involving clinical depression as well as co-occuring conditions suggest that the decisions made by an AI system can improve patient outcomes from 30-35% while reducing costs by 50-55%.
medicine, uncertainty, electronic health records, Markov decision processes, optimal planning
NSF Smart and Connected Health Program

DRC-Hubo: a ladder-climbing humanoid robot for the DARPA Robotics Challenge
Summary (click to show)
As part of the 2013 DARPA Robotics Challenge, we are developing ladder- and stair- climbing skills for humanoid robots that may be used in disaster relief and industrial maintenance scenarios. Such tasks are challenging because they require upper-body strength, multi-limbed balance coordination, and fine motions for obstacle avoidance. We developed planners that can carefully deliberate about the robot's physical capabilities, and applied them planner-aided design to establish specifications for a new robot, DRC-Hubo. Using our software, DRC-Hubo is able to autonomously mount, climb, and dismount stairs and ladders. This project is conducted as part of Team HUBO, a multi-university team led by Drexel University.
integrated planning and perception, hybrid motion planning, large-scale planning, humanoids, locomotion
DARPA Robotics Challenge (Track A)

SLIKMC: scalable protein loop conformation sampling
Summary (click to show)
Protein loops are flexible structures that are intimately tied to function, but understanding loop motion and generating loop conformation ensembles remain significant computational challenges. We have developed a new Markov chain
Monte Carlo algorithm, Sub-Loop Inverse Kinematics Monte Carlo (SLIKMC), for generating conformations of closed loops according to experimentally available,
heterogeneous structural preferences. Our simulation experiments demonstrate that the method computes high-scoring conformations of large loops (>10 residues) orders of magnitude faster than standard Monte Carlo and discrete search techniques. Protein conformations with 100+ residues are sampled on standard PC hardware in seconds. Application to proteins involved in ion-binding demonstrate its potential as a tool for loop ensemble generation and missing structure completion
theory, uncertainty, sampling, computational biology

Integrated task, contact, and motion planning
Summary (click to show)
In order for robots to perform increasly sophisticated manipulation tasks in the home and in industrial settings, they must be able to coordinate the motion of many joints to achieve symbolic tasks, involving intricate changes of contact. Similar problems are faced by legged robots traversing rough terrain. We aim to build new tools and theory for integrating discrete task planning (typically considered a domain of AI) and continuous motion planning (considered a domain of robotics) within a single framework. Our planners have addressed manipulation and legged locomotion problems in configuration spaces with up to 42 dimensions, and we have proven the asymptotic reliability properties of our algorithms in general settings. Current work is studying programming support for rapid planner prototyping, as well as general-purpose planning strategies that exploit problem structure and learn from past experience.
theory, hybrid motion planning, large-scale planning, sampling, locomotion

Avoiding many moving obstacles in intelligent vehicles
Summary (click to show)
Description forthcoming.
semiautonomous vehicles, kinodynamic planning, real-time planning, optimal planning
IU Collaborative Research Grant Program
Intelligent clinical decision support using Markov decision processes
Summary (click to show)
The explosion in the amount of medical data available in Electronic Health Records (EHRs) provides an opportunity for computers to aid clinicians in providing effective, affordable healthcare. We are investigating Markov Decision Process techniques that are able to recommend patient-specific treatment plans in the presence of noisy and incomplete observations. Like a real doctor, the system is able to reason in the space of belief states, integrating uncertainties and contingencies into its plans. Results on a 5,807 patient dataset involving clinical depression as well as co-occuring conditions suggest that the decisions made by an AI system can improve patient outcomes from 30-35% while reducing costs by 50-55%.
medicine, uncertainty, electronic health records, Markov decision processes, optimal planning
NSF Smart and Connected Health Program
DRC-Hubo: a ladder-climbing humanoid robot for the DARPA Robotics Challenge
Summary (click to show)
As part of the 2013 DARPA Robotics Challenge, we are developing ladder- and stair- climbing skills for humanoid robots that may be used in disaster relief and industrial maintenance scenarios. Such tasks are challenging because they require upper-body strength, multi-limbed balance coordination, and fine motions for obstacle avoidance. We developed planners that can carefully deliberate about the robot's physical capabilities, and applied them planner-aided design to establish specifications for a new robot, DRC-Hubo. Using our software, DRC-Hubo is able to autonomously mount, climb, and dismount stairs and ladders. This project is conducted as part of Team HUBO, a multi-university team led by Drexel University.
integrated planning and perception, hybrid motion planning, large-scale planning, humanoids, locomotion
DARPA Robotics Challenge (Track A)
SLIKMC: scalable protein loop conformation sampling
Summary (click to show)
Protein loops are flexible structures that are intimately tied to function, but understanding loop motion and generating loop conformation ensembles remain significant computational challenges. We have developed a new Markov chain
Monte Carlo algorithm, Sub-Loop Inverse Kinematics Monte Carlo (SLIKMC), for generating conformations of closed loops according to experimentally available,
heterogeneous structural preferences. Our simulation experiments demonstrate that the method computes high-scoring conformations of large loops (>10 residues) orders of magnitude faster than standard Monte Carlo and discrete search techniques. Protein conformations with 100+ residues are sampled on standard PC hardware in seconds. Application to proteins involved in ion-binding demonstrate its potential as a tool for loop ensemble generation and missing structure completion
theory, uncertainty, sampling, computational biology
Integrated task, contact, and motion planning
Summary (click to show)
In order for robots to perform increasly sophisticated manipulation tasks in the home and in industrial settings, they must be able to coordinate the motion of many joints to achieve symbolic tasks, involving intricate changes of contact. Similar problems are faced by legged robots traversing rough terrain. We aim to build new tools and theory for integrating discrete task planning (typically considered a domain of AI) and continuous motion planning (considered a domain of robotics) within a single framework. Our planners have addressed manipulation and legged locomotion problems in configuration spaces with up to 42 dimensions, and we have proven the asymptotic reliability properties of our algorithms in general settings. Current work is studying programming support for rapid planner prototyping, as well as general-purpose planning strategies that exploit problem structure and learn from past experience.
theory, hybrid motion planning, large-scale planning, sampling, locomotion
Avoiding many moving obstacles in intelligent vehicles
Summary (click to show)
Description forthcoming.
semiautonomous vehicles, kinodynamic planning, real-time planning, optimal planning
IU Collaborative Research Grant Program

