Autonomous Robot Packing of Complex-shaped Objects
Fan Wang and Kris Hauser
Summary
With the unprecedented growth of the E-Commerce market, robotic warehouse automation has attracted much interest and capital investment. Compared to a conventional labor-intensive approach, an automated robot warehouse brings potential benefits such as increased uptime, higher total throughput, and lower accident rates. To date, warehouse automation has mostly developed in inventory mobilization and object picking.
Recently, one area that has attracted a lot of research attention is automated packaging or packing, a process during which robots stow objects into small confined spaces, such as shipping boxes. Packing items densely improves the storage capacity, decreases the delivery cost, and saves packing materials. However, it is a demanding manipulation task that has not been thoroughly explored by the research community.
This project focuses on packing objects of arbitrary shapes, weights, and deformation into a single shipping box with a robot manipulator. We seek to advance the state-of-the-art in robot packing with regards to optimizing container size for a set of objects, planning object placements for stability and feasibility, and increasing robustness of packing execution with a robot manipulator.
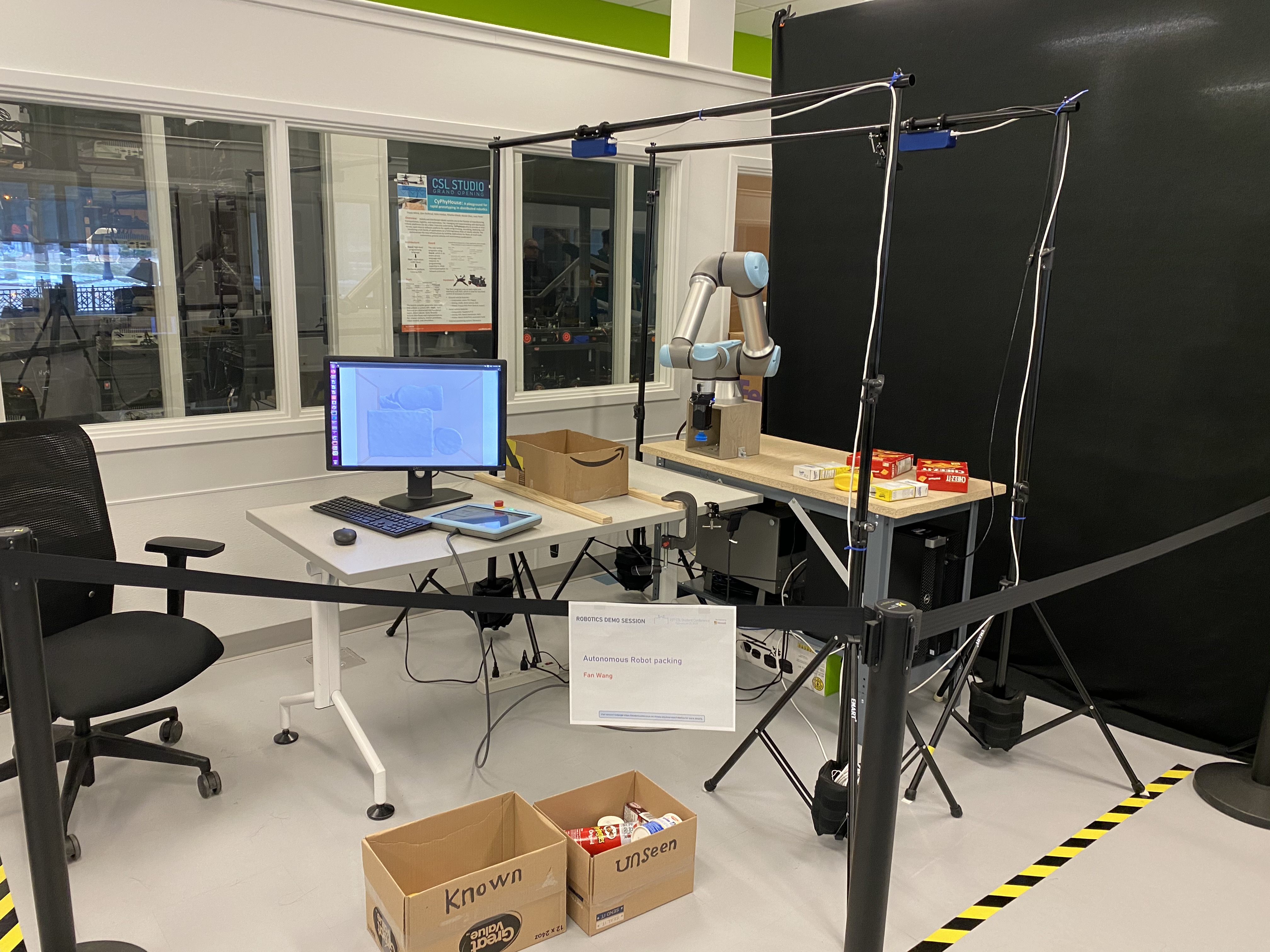
Current progress has resulted in a software and hardware system comprising a robot work cell that acquires 3D models of objects, optimizes their packing locations to improve packing density, and packs them into the chosen container using a robot manipulator. The system can also compute the smallest container that contains all items from a discrete set of possible containers, which minimizes shipping cost and waste. The system also implements robustness measures to increase the success rate of the packing system under real-world uncertainties.
In preliminary experiments, our prototype system is able to achieve 98% success rates in packing item sets of five items, chosen at random from a set of 12 possible household items, into cardboard shipping boxes. By dynamically acquiring 3D shape models, eliminating the need for pose recognition, we increase its success rate even further to 100% success rate.
Patent pending- F. Wang and K. Hauser. Dense Robot Packing of Irregular and Novel 3D Objects. IEEE Transactions on Robotics, 2021, doi:10.1109/TRO.2021.3097261.

- F. Wang and K. Hauser. Robot Packing with Known Items and Nondeterministic Arrival Order. IEEE Transactions on Automation Science and Engineering, 2020.
- F. Wang and K. Hauser. Stable Bin Packing of Non-convex 3D Objects with a Robot Manipulator. IEEE International Conference on Robotics and Automation, May, 2019. (A prior version was available in ArXiv, 2018.)

- F. Wang and K. Hauser. Robot Packing with Known Items and Nondeterministic Arrival Order. Robotics: Science and Systems (RSS), June 2019. Best Paper Award nominee.