Convenience class for edge planner that holds a smart pointer to a CSpace so that the temporary CSpace is destroyed when the edge is destroyed. Typically used for single-constraint edge checkers as follows: More...
#include <EdgePlannerHelpers.h>
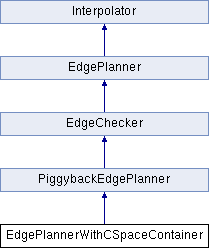
Inheritance diagram for EdgePlannerWithCSpaceContainer:
Public Member Functions | |
| EdgePlannerWithCSpaceContainer (const std::shared_ptr< CSpace > &space, const EdgePlannerPtr &e) | |
| virtual EdgePlannerPtr | Copy () const |
| virtual EdgePlannerPtr | ReverseCopy () const |
 Public Member Functions inherited from PiggybackEdgePlanner Public Member Functions inherited from PiggybackEdgePlanner | |
| PiggybackEdgePlanner (EdgePlannerPtr e) | |
| Initialize normally. | |
| PiggybackEdgePlanner (CSpace *space, const InterpolatorPtr &path, EdgePlannerPtr e) | |
| Initialize in override mode. | |
| PiggybackEdgePlanner (CSpace *space, const Config &a, const Config &b, EdgePlannerPtr e) | |
| Initialize in override mode. | |
| virtual bool | IsVisible () |
| virtual bool | IsIncremental () const |
| virtual Real | Priority () const |
| virtual bool | Plan () |
| virtual bool | Done () const |
| virtual bool | Failed () const |
| virtual void | Eval (Real u, Config &x) const |
| virtual Real | Length () const |
| virtual const Config & | Start () const |
| virtual const Config & | End () const |
| virtual CSpace * | Space () const |
| Public Member Functions inherited from EdgeChecker | |
| EdgeChecker (CSpace *space, const InterpolatorPtr &path) | |
| EdgeChecker (CSpace *space, const Config &a, const Config &b) | |
| Public Member Functions inherited from Interpolator | |
| virtual Real | ParamStart () const |
| virtual Real | ParamEnd () const |
Public Attributes | |
| std::shared_ptr< CSpace > | spacePtr |
| Public Attributes inherited from PiggybackEdgePlanner | |
| EdgePlannerPtr | e |
| Public Attributes inherited from EdgeChecker | |
| CSpace * | space |
| InterpolatorPtr | path |
Detailed Description
Convenience class for edge planner that holds a smart pointer to a CSpace so that the temporary CSpace is destroyed when the edge is destroyed. Typically used for single-constraint edge checkers as follows:
SubsetConstraintCSpace* ospace = new SubsetConstraintCSpace(this,obstacle) return new EdgePlannerWithCSpaceContainer(ospace,new XEdgePlanner(ospace,path))
The documentation for this class was generated from the following files:
- EdgePlannerHelpers.h
- EdgePlanner.cpp
