A controller that uses a piecewise polynomial trajectory. More...
#include <PathController.h>
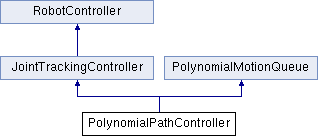
Inheritance diagram for PolynomialPathController:
Public Member Functions | |
| PolynomialPathController (Robot &robot) | |
| virtual const char * | Type () const |
| virtual void | GetDesiredState (Config &q_des, Vector &dq_des) |
| subclasses should override this | |
| virtual void | Update (Real dt) |
| virtual void | Reset () |
| virtual bool | ReadState (File &f) |
| virtual bool | WriteState (File &f) const |
| virtual vector< string > | Commands () const |
| virtual bool | SendCommand (const string &name, const string &str) |
 Public Member Functions inherited from JointTrackingController Public Member Functions inherited from JointTrackingController | |
| JointTrackingController (Robot &robot) | |
| Public Member Functions inherited from RobotController | |
| RobotController (Robot &robot) | |
| virtual map< string, string > | Settings () const |
| virtual bool | GetSetting (const string &name, string &str) const |
| virtual bool | SetSetting (const string &name, const string &str) |
| void | SetPIDCommand (const Config &qdes) |
| void | SetPIDCommand (const Config &qdes, const Config &dqdes) |
| void | SetFeedforwardPIDCommand (const Config &qdes, const Config &dqdes, const Vector &torques) |
| void | SetTorqueCommand (const Vector &torques) |
| bool | GetCommandedConfig (Config &q) |
| bool | GetCommandedVelocity (Config &dq) |
| bool | GetSensedConfig (Config &q) |
| bool | GetSensedVelocity (Config &dq) |
| Public Member Functions inherited from PolynomialMotionQueue | |
| void | SetLimits (const Robot &robot) |
| void | SetConstant (const Config &x) |
| Sets a constant trajectory. | |
| void | SetPath (const Spline::PiecewisePolynomialND &path) |
| Sets the trajectory from a PiecewisePolynomialND. | |
| void | SetPath (const ParabolicRamp::DynamicPath &path) |
| Sets the trajectory from a DynamicPath. | |
| void | SetPiecewiseLinear (const vector< Config > &milestones, const vector< Real > ×) |
| void | SetPiecewiseCubic (const vector< Config > &milestones, const vector< Vector > &velocities, const vector< Real > ×) |
| void | SetPiecewiseLinearRamp (const vector< Config > &milestones) |
| void | Advance (Real dt) |
| Moves forward the internal time marker. | |
| void | Append (const Spline::PiecewisePolynomialND &path) |
| void | Append (const ParabolicRamp::DynamicPath &path) |
| Appends a DynamicPath. | |
| void | AppendLinear (const Config &config, Real dt) |
| void | AppendCubic (const Config &x, const Config &v, Real dt) |
| void | AppendRamp (const Config &x) |
| Appends a time-optimal ramp from the end configuration/velocity to x. | |
| void | AppendLinearRamp (const Config &x) |
| void | AppendRamp (const Config &x, const Vector &v) |
| void | GetPath (Spline::PiecewisePolynomialND &path) const |
| Retrieves the path, defined on the range [t0,t0+T]. | |
| void | Cut (Real time, bool relative=true) |
| Real | CurTime () const |
| Returns the current time t0. | |
| Config | CurConfig () const |
| Returns the configuration at the current time y(t0) | |
| Config | CurVelocity () const |
| Returns the velocity at the current time y'(t0) | |
| Config | Endpoint () const |
| Returns the configuration at the end time y(t0+T) | |
| Vector | EndpointVelocity () const |
| Returns the velocity at the end time y'(t0+T) | |
| void | Eval (Real time, Config &x, bool relative=true) const |
| void | Deriv (Real time, Config &dx, bool relative=true) const |
| bool | Done () const |
| Returns true if there is no more trajectory to be executed. | |
| Real | TimeRemaining () const |
| Returns the duration of the trajectory remaining to be executed. | |
Additional Inherited Members | |
| Public Attributes inherited from JointTrackingController | |
| Config | qdesDefault |
| Public Attributes inherited from RobotController | |
| Robot & | robot |
| Real | time |
| Real | nominalTimeStep |
| a "desired" time step, by default 0, which acts as a hint to the simulator. Note that it doesn't have to abide the hint. | |
| RobotSensors * | sensors |
| sensor input (filled in by simulator) | |
| RobotMotorCommand * | command |
| motor command output (output to simulator) | |
| Public Attributes inherited from PolynomialMotionQueue | |
| Real | pathOffset |
| Spline::PiecewisePolynomialND | path |
| Vector | qMin |
| Vector | qMax |
| Vector | velMax |
| Vector | accMax |
Detailed Description
A controller that uses a piecewise polynomial trajectory.
Accepts commands set_q,append_q,set_tq,append_tq,set_qv,append_qv, append_q_linear,brake.
The documentation for this class was generated from the following file:
