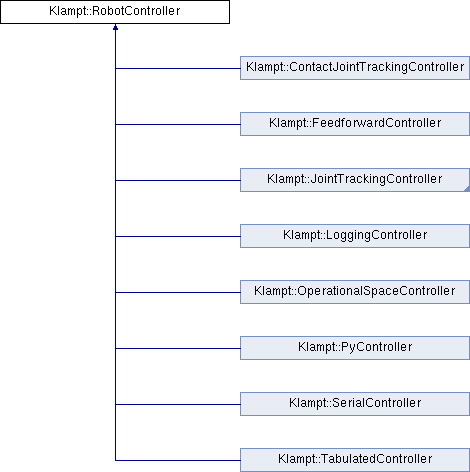
A base class for a robot controller. The base class does nothing. More...
#include <Controller.h>
Public Member Functions | |
| RobotController (RobotModel &robot) | |
| virtual const char * | Type () const |
| virtual void | Update (Real dt) |
| virtual void | Reset () |
| virtual bool | ReadState (File &f) |
| virtual bool | WriteState (File &f) const |
| virtual map< string, string > | Settings () const |
| virtual bool | GetSetting (const string &name, string &str) const |
| virtual bool | SetSetting (const string &name, const string &str) |
| virtual vector< string > | Commands () const |
| virtual bool | SendCommand (const string &name, const string &str) |
| void | SetPIDCommand (const Config &qdes) |
| void | SetPIDCommand (const Config &qdes, const Config &dqdes) |
| void | SetFeedforwardPIDCommand (const Config &qdes, const Config &dqdes, const Vector &torques) |
| void | SetTorqueCommand (const Vector &torques) |
| bool | GetCommandedConfig (Config &q) |
| bool | GetCommandedVelocity (Config &dq) |
| bool | GetSensedConfig (Config &q) |
| bool | GetSensedVelocity (Config &dq) |
Public Attributes | |
| RobotModel & | robot |
| Real | time |
| Real | nominalTimeStep |
| a "desired" time step, by default 0, which acts as a hint to the simulator. Note that it doesn't have to abide the hint. | |
| RobotSensors * | sensors |
| sensor input (filled in by simulator) | |
| RobotMotorCommand * | command |
| motor command output (output to simulator) | |
Detailed Description
A base class for a robot controller. The base class does nothing.
The sensors and command pointer will be set up by the simulator/real robot. In the Update function, the controller should read the sensor information in sensors and write the desired joint commands to the command pointer.
Reset is called when the user hits reset on the simulation.
To support reading and writing controller states, fill in the ReadState and WriteState functions.
To support user-supplied configuration parameters, fill in the Settings() methods. These are currently used in SimTest but in the future we hope to support more general methods for getting/setting controller settings, e.g. in an XML file.
The documentation for this class was generated from the following file:
