An abstract base class for processing user input through a 2D mouse driven gui into PlannerObjectives used for planning. More...
#include <InputProcessor.h>
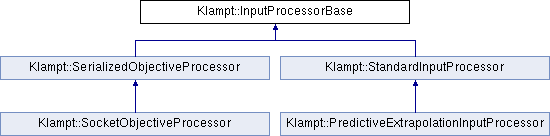
Inheritance diagram for Klampt::InputProcessorBase:
Public Member Functions | |
| virtual string | Instructions () const |
| virtual void | Activate (bool enabled) |
| virtual bool | HasUpdate () |
| virtual void | Hover (int mx, int my) |
| virtual void | Drag (float dx, float dy) |
| virtual void | Spaceball (const RigidTransform &T) |
| virtual void | SetGlobalTime (Real time) |
| virtual void | SetPredictionTime (Real splitTime) |
| virtual PlannerObjectiveBase * | MakeObjective (RobotModel *robot) |
| virtual void | DrawGL () |
| RobotModel * | GetRobot () const |
| void | GetClickRay (int mx, int my, Ray3D &ray) const |
Public Attributes | |
| WorldModel * | world |
| Camera::Viewport * | viewport |
| Real | currentTime |
Detailed Description
An abstract base class for processing user input through a 2D mouse driven gui into PlannerObjectives used for planning.
If a new objective is available, return true in HasUpdate(), and MakeObjective should return a new PlannerObjectiveBase object.
The documentation for this class was generated from the following file:
