
Interactive Generation of Dynamically Feasible Robot Trajectories from Sketches Using Temporal Mimicking
Jingru Luo and Kris Hauser. To appear in ICRA 2012
Abstract. This paper presents a method for generating dynamically-feasible, natural-looking robot motion from freehand sketches. Using trajectory optimization, it handles sketches that are too fast, jerky, or pass out of reach by enforcing the constraints of the robot's dynamic limitations while minimizing the relative temporal differences between the robot's trajectory and the sketch. To make the optimization fast enough for interactive use, a variety of enhancements are employed including decoupling the geometric and temporal optimizations and methods to select good initial trajectories. The technique is also applicable to transferring human motions onto robots with non-human appearance and dynamics, and we use our method to demonstrate a simulated humanoid imitating a golf swing as well as an industrial robot performing the motion of writing a cursive hello word.
Download PDF ![]()
Media
All videos are captured on a 2.4Ghz laptop PC. Each second in the video corresponds to exact one second in real time.
Golf Swing on a Simulated Humanoid
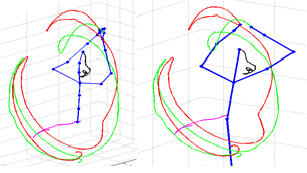
We applied our method to replicate the human motion of golf swing using a simulated 29 DOF model of a humanoid upper torso. Joint limit, velocity, acceleration, and torque constraints were set to relatively large human-like values.
MP4, 1.39mb
Writing A Cursive "hello" on Staubli TX90L Industrial Robot
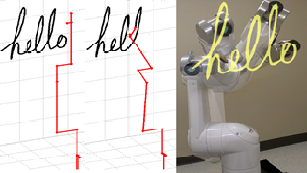
We applied a wrting motion to the 6DOF Staubli TX90L industrial robot in our lab. To emphasize the endeffector trajectory, we tried the sketch of a cursive "hello" word. The sketch was generated by mouse stroke with a total length of 3.68m and total time of 12.13 s. The optimized motion has the geometric MSE of 0.02, relative temporal MSE of 0.13 and execution time of 18 s.
MP4, 3.41mb
Boxing Motion on Staubli TX90L Industrial Robot
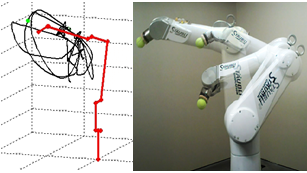
We applied a human boxing motion to the 6DOF Staubli TX90L industrial robot. The motion of the right arm of the human relative to its shoulder was extracted and mimimicked using our technique.
MP4, 2.07mb

