
Real-time kinodynamic planning and optimization
Weidong (Bill) Sun, Gao Tang, Yajia Zhang, Jingru Luo, Kris Hauser
Summary
This research theme investigates optimizing motion planners and architectures for dynamic real-time systems. We have developed new fast optimization techniques let robots execute motions more quickly while strictly respecting dynamic constraints; moreover, the added computational costs are worth the savings in execution time. New time-stepping architectures are proven to be asymptotically complete in a deterministic environment with changing goals, and experiments suggest improved safety in unpredictably dynamic environments compared to other state-of-the-art techniques. These algorithms have been applied to agile drone flight, assisted teleoperation of a 6DOF robot arm, navigation amongst unpredictable moving obstacles, and humanoid robot locomotion.
- W. Sun, G. Tang, and K. Hauser. Fast UAV Trajectory Optimization using Bilevel Optimization with Analytical Gradients. IEEE Transactions on Robotics, 37(6):2010-2024, Dec, 2021. doi:10.1109/TRO.2021.3076454.


- Y. Ding, M. Zhang, C. Li, H.-W. Park, and K. Hauser. Hybrid Sampling/Optimization-based Planning for Agile Jumping Robots on Challenging Terrains. IEEE International Conference on Robotics and Automation (ICRA), May 2021.

- W. Sun, G. Tang, and K. Hauser. Fast UAV Trajectory Optimization using Bilevel Optimization with Analytical Gradients. 2020 American Control Conference (ACC), July 2020.
- G. Tang, W. Sun, and K. Hauser. Enhancing Bilevel Optimization for UAV Time-Optimal Trajectory using a Duality Gap Approach. IEEE International Conference on Robotics and Automation (ICRA), June 2020 Summary video ICRA 10-minute talk video
- G. Tang, W. Sun, and K. Hauser. Time-Optimal Trajectory Generation for Dynamic Vehicles: A Bilevel Optimization Approach. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October, 2019.
- W. Sun, G. Tang, and K. Hauser. Fast UAV Trajectory Optimization using Bilevel Optimization with Analytical Gradients. ArXiv, 2018.
- K. Hauser and Y. Zhou. Asymptotically Optimal Planning by Feasible Kinodynamic Planning in State-Cost Space. IEEE Transactions of Robotics, 32(6): 1431-1443, 2016. Also in arXiv:1505.04098 [cs.RO], 2015.
- J. Luo and K. Hauser. Robust Trajectory Optimization Under Frictional Contact with Iterative Learning. Robotics: Science and Systems (RSS), July 2015.
- K. Hauser. Lazy Collision Checking in Asymptotically-Optimal Motion Planning. IEEE Intl. Conference on Robotics and Automation (ICRA), May 2015.
- J. Luo and K. Hauser. An Empirical Study of Optimal Motion Planning. IEEE/RSJ Intl. Conference on Intelligent Robots and Systems (IROS), September 2014.
- K. Hauser. Fast Interpolation and Time-Optimization with Contact. International Journal of Robotics Research (IJRR), 33(9):1231-1250, August, 2014. doi: 10.1177/0278364914527855

- K. Hauser. Fast Interpolation and Time-Optimization on Implicit Contact Submanifolds. In proceedings of Robotics: Science and Systems (RSS), Berlin, Germany, June 2013.
-
Y. Zhang, J. Luo, and K. Hauser. Sampling-based Motion Planning With Dynamic Intermediate State Objectives: Application to Throwing. In IEEE Int'l Conference on Robotics and Automation (ICRA), Minneapolis, May 2012.
-
J. Luo and K. Hauser. Interactive Generation of Dynamically Feasible Robot Trajectories from Sketches Using Temporal Mimicking. In IEEE Int'l Conference on Robotics and Automation (ICRA), Minneapolis, May 2012.
-
K. Hauser. On Responsiveness, Safety, and Completeness in Real-Time Motion Planning. Autonomous Robots, 32(1):35-48, 2012.
-
K. Hauser. Adaptive Time Stepping in Real-Time Motion Planning. In Workshop on the Algorithmic Foundations of Robotics, Singapore, 2010.
-
K. Hauser and V. Ng-Thow-Hing. Fast Smoothing of Manipulator Trajectories using Optimal Bounded-Acceleration Shortcuts. In IEEE Intl. Conf. of Robotics and Automation (ICRA), Anchorage, USA, May 2010.
- Asymptotically Optimal Planning by Feasible Kinodynamic Planning in State-Cost Space (In submission, 2015)
- An Empirical Study of Optimal Motion Planning (IROS 2014)
- Fast Interpolation and Time-Optimization on Implicit Contact Submanifolds (RSS 2013, ICRA 2014, IJRR 2014)
- Interactive Generation of Dynamically Feasible Robot Trajectories from Sketches Using Temporal Mimicking (ICRA 2012)
- On Responsiveness, Safety, and Completeness in Real-Time Motion Planning (WAFR 2010, AutoRob 2011)
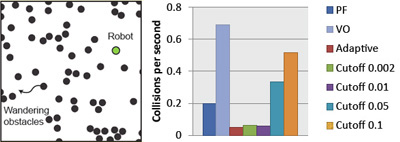
Real-time obstacle avoidance with 63 moving obstacles with unpredictable, randomized behavior but bounded velocity. Robot has bounded acceleration. Real-time motion planning with adaptive time-stepping (Adaptive) is compared with constant time-stepping (Cutoff X), and two other methods: reactive potential field (PF) [Ge and Cui, 2001] and velocity obstacles (VO) [Fiorini and Shiller, 1998].
Parabolic Path Smoother Examples (ICRA 2010)
- Manifold Interpolation and Time-Optimal Smoothing (Mintos) library
- Parabolic Path Smoother library

