
Cooperative motion planning for human-operated robots
Kris Hauser
Summary
This project aims to advance decision-making techniques for robots that cooperate with human operators. Because humans far exceed the abilities of state-of-the-art robots in vision, creativity, and adaptability, interest is rapidly growing in a human-centered approach to robotics: combining the strengths of humans with the superior precision and repeatability of robots. And yet, our available motion planning tools, while powerful at computing motions for complex autonomous tasks, are poorly suited for human-centered applications that demand responsive and natural motions. We hypothesize that a new cooperative motion planning paradigm will support major advances in intuitiveness and task performance of human-operated robots such as intelligent vehicles, tele-surgery systems, search-and-rescue robots, and household robots.
- N. Zhong and K. Hauser. Attentiveness Map Estimation for Haptic Teleoperation of Mobile Robot Obstacle Avoidance and Approach. IEEE Robotics and Automation Letters, 2024 (to appear)

- Y. Zhou and K. Hauser. CPI: Conservativeness, Permissiveness and Intervention Metrics for Shared Control Evaluation. IEEE Robotics and Automation Letters, 7(3):6367-6374, July 2022. doi: 10.1109/LRA.2022.3169581
- K. Hauser. Continuous Pseudoinversion of a Multivariate Function: Application to Global Redundancy Resolution. Workshop on the Algorithmic Foundations of Robotics (WAFR), 2016. Best Paper Award nominee.

- K. Hauser. Recognition, Prediction, and Planning for Assisted Teleoperation with Freeform Tasks. Autonomous Robots, 35(4): 241-254, August, 2013. doi:10.1007/s10514-013-9350-3.


- K. Hauser. Recognition, Prediction, and Planning for Assisted Teleoperation with Freeform Tasks. Robotics: Science and Systems, Sydney, Australia, July 2012.
-
J. Luo and K. Hauser. Interactive Generation of Dynamically Feasible Robot Trajectories from Sketches Using Temporal Mimicking. In IEEE Int'l Conference on Robotics and Automation (ICRA), Minneapolis, May 2012.
-
K. Hauser. On Responsiveness, Safety, and Completeness in Real-Time Motion Planning. Autonomous Robots, 32(1):35-48, 2012.
-
E. You and K. Hauser. Assisted Teleoperation Strategies for Aggressively Controlling a Robot Arm with 2D Input. In Robotics: Science and Systems, Los Angeles, July 2011.
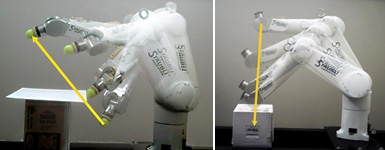
Cooperative motion planning generates motions in real-time that avoid obstacles, even when the user's command (yellow) is unsafe.
Users with cooperative motion planning (CMP) solved problems on a 6DOF manipulator twice as fast as basic Cartesian control (IK), and at a 12x lower collision rate.
Users perceived CMP as significantly safer and providing a better experience than other techniques, while not significantly detracting from predictability and cooperativeness (asterisk denotes statistical significance at the p < 0.05 level.)
- Assisted teleoperation GUI (RSS 2011)
 NSF CAREER #1253553
NSF CAREER #1253553NSF NRI #2024775
 IU Faculty Research Support Program
IU Faculty Research Support Program
