
About
The Intelligent Motion Lab is a "full stack" robotics lab that studies how planning, perception, and learning ought to be integrated to enable autonomous and semi-autonomous operation in challenging tasks. The research conducted in the lab spans basic research on component algorithms up to application-driven integration projects on robot systems. Applications of this work have included intelligent vehicles, robot manipulation, legged locomotion, human-robot interaction, robot- and computer-assisted medicine.
IML is directed by Prof. Kris Hauser and is part of the University of Illinois Grainger College of Engineering.
IML is currently accepting applications for new PhD students. Candidates should apply to the UIUC CS or ECE departments for consideration.
Research Spotlight
Automated Heart and Lung Auscultation
Selected Projects
Tele-nursing robots
Summary (click to show)Cooperative motion planning for human-operated robots
Summary (click to show)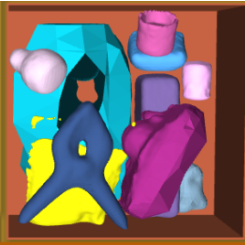
Autonomous robot packing of complex-shaped objects
Summary (click to show)Knowledge- and structure-driven motion planning
Summary (click to show)For a complete list, please see the research page.

